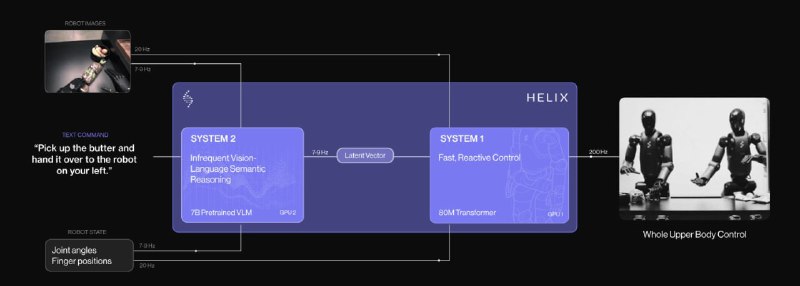
Я думаю, всё это закончится многослойными архитектурами, вот статья теории про эту скорость-точность в управлении, "Towards a Theory of Control Architecture: A quantitative framework for layered multi-rate control", https://arxiv.org/abs/2401.15185, а картинку из этой работы я приводил в конце предыдущего поста (https://ailev.livejournal.com/1755013.html) -- пешком передвигаться можно точно к месту назначения, но медленно, на самолёте -- очень неточно, но очень быстро, автобус -- не так быстро как на самолёте, но быстрее чем пешком, но не так неточно, как на самолёте, но не так точно, как пешком. А как надо? Вот так и надо: многослойное действие (пешком-автобус-самолёт-автобус-пешком). Вот тут эта многослойность управления и две нейронки уже есть: — медленный слой работает на 7-9Hz, быстрый — 20Hz, архитектура разная (7B VLM и 80М transformer), https://www.figure.ai/news/helix. Такое должно не только в роботах появляться, но и везде во взаимодействии AI-систем с окружением, хоть и не физическими. Диалог — как раз пример такого взаимодействия. Вот картинка.

>>Click here to continue<<